Moving Spring
The MovingSpring element simulates a moving spring (a combination of spring and damper) rolling on a line or surface defined by beam elements.
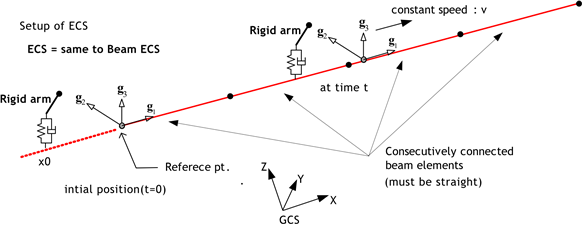
Fig. 4.12-1. MovingSpring Element on a Line Composed of Beams
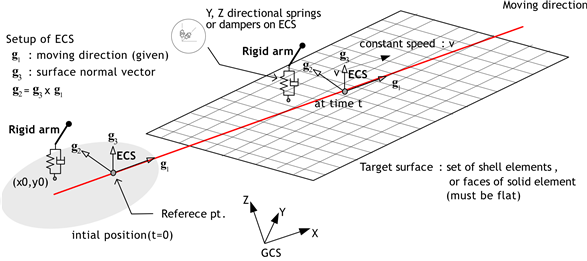
Fig. 4.12-2. MovingSpring Element on a 3D Surface
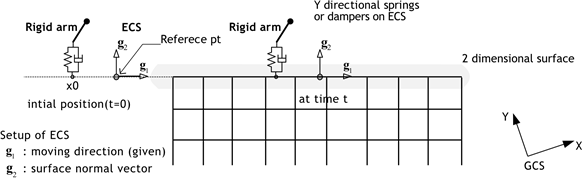
Fig. 4.12-3. MovingSpring Element on a 2D Surface
▪ Notes
- When performing dynamic analysis, a preliminary static analysis considering self-weight must be conducted first.
- To activate the MovingSpring element, the speed must be defined using
*Field, Type=MovingSpringSpeed. - If damping is considered, the overall stiffness matrix will become an asymmetric matrix.
Example
*ELSET, Name=rail
Beam
*SECTION, TYPE=PointMass, Name=PM
5750
*SECTION, TYPE=MovingSpring, Name=MS
Ky=1595E3 Cy=1000E3 # R=1.,2.,3.
Line=rail
*Element, TYPE=PointMass, ELSET=PM
1000 1000, S=PM
*Element, TYPE=MovingSpring, ELSET=MS
1001 1000, S=MS
*Distribution, TYPE=MovingSpringInitialPosition
1001, 0.0
*Load, TYPE=Gravity, Name=SelfWeight
1000,0,-9.81, 0.
*STEP, TYPE=Static Name=S
*Activate, TYPE=Element
Beam, PM, MS
*Activate, TYPE=Constraint
BC
*Activate, TYPE=Load
SelfWeight
*STEP, TYPE=Dynamic Name=Dyn, Prev=S
EquiTime=0.02,2.
*Field, Type=MovingSpringSpeed
MS, 27.78
*Element, Type=MovingSpring
*Element, Type=MovingSpring, ELSet=elset
id, n1{, S=section, P=x,y}
...
First dataline and subsequent datalines
- P=x,y: Initial position relative to the reference point. Defined in the ECS. When targeting beam elements, the
yvalue is ignored.
Specifications
- No. of nodes: 1
- No. of integration points: 1
- Fields: SF=[...], SE=[...], DF=[...], DE=[...] at the element center.
- Compatible section: MovingSpring
- Active DOFs: Can include Y and Z depending on the definition.
Refer to *Element, TYPE=Spring for explanations of SF, SE, DF, and DE.
*Section, Type=MovingSpring
Defines the properties for a MovingSpring.
*Section, Type=MovingSpring, Name=name
surface, refx, refy, refz, g1x, g1y, g1z, xRigid, yRigid, zRigid
oneDof, k,kmat, c, cmat # oneDof = Y, Z
...
*Section, Type=MovingSpring, Name=name
line, xRigid, yRigid, zRigid
oneDof, k,kmat, c, cmat # oneDof = Y, Z
...
First dataline for Line
- line: Target beam elset ... The beams should be connected.
- xRigid, yRigid, zRigid: Position vector from the reference node (rigid arm vector).
x1is required, others are optional.
First dataline for Surface
- surface: Target surface (required).
- refx, refy, refz: Reference point (optional, default is 0, 0, 0).
- g1x, g1y, g1z: Direction of travel (1, 0, 0).
- xRigid, yRigid, zRigid: Position vector from the reference node (rigid arm vector) (optional, default is 0, 0, 0).
Second dataline
- oneDof: Degree of freedom to which the spring/damper is applied, either Y or Z.
- k, km: Spring coefficient and model for the specified degree of freedom;
kmis optional. - c, cm: Damping coefficient and model for the specified degree of freedom;
cmis optional.
Third dataline if necessary
- oneDof: Degree of freedom to which the spring/damper is applied, either Y or Z.
- k, km: Spring coefficient and model for the specified degree of freedom;
kmis optional. - c, cm: Damping coefficient and model for the specified degree of freedom;
cmis optional.