Moving Spring 요소
MovingSpring 요소는 보요소로 구선된 선 또는 면 위를 구르는 이동 스프링(스프링과 댐퍼의 조합)을 모사한다.
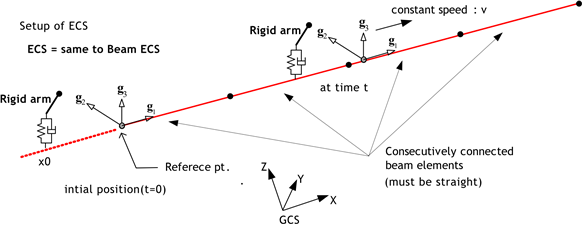
Fig. 4.12-1. Beam으로 구성된 선위의 MovingSpring 요소
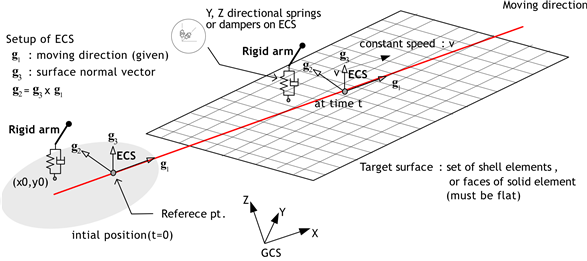
Fig. 4.12-2. 3차원 surface 상의 MovingSpring 요소
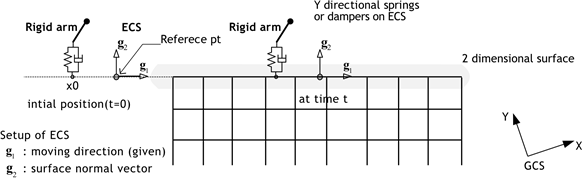
Fig. 4.12-3. 2차원 Surface 상의 MovingSpring 요소
▪ 주의
- 동해석을 수행할 경우 먼저 자중을 고려한 정해석을 수행해야 한다
- 이동스프링 요소를 구동하기 위해서는
*Field, Type=MovingSpringSpeed를 이용해 속도를 지정해야 한다. - 감쇠를 고려할 경우 전체 강성 행렬은 비대칭행렬이 된다.
Example
*ELSET, Name=rail
Beam
*SECTION, TYPE=PointMass, Name=PM
5750
*SECTION, TYPE=MovingSpring, Name=MS
Ky=1595E3 Cy=1000E3 # R=1.,2.,3.
Line=rail
*Element, TYPE=PointMass, ELSET=PM
1000 1000, S=PM
*Element, TYPE=MovingSpring, ELSET=MS
1001 1000, S=MS
*Distribution, TYPE=MovingSpringInitialPosition
1001, 0.0
*Load, TYPE=Gravity, Name=SelfWeight
1000,0,-9.81, 0.
*STEP, TYPE=Static Name=S
*Activate, TYPE=Element
Beam, PM, MS
*Activate, TYPE=Constraint
BC
*Activate, TYPE=Load
SelfWeight
*STEP, TYPE=Dynamic Name=Dyn, Prev=S
EquiTime=0.02,2.
*Field, Type=MovingSpringSpeed
MS, 27.78
*Element, Type=MovingSpring
*Element, Type=MovingSpring, ELSet=elset
id, n1{, S=section, P=x,y}
...
First dataline and subsequent datalines
- P=x,y: Reference point에 대한 초기 위치. ECS상에 정의되며, 보요소를 대상으로 할 때는 y는 무시됨
Specifications
- No. of nodes: 1
- No. of integration pts.: 1
- Fields: SF=[...], SE=[...], DF=[...], DE=[...] at element center.
- Compatible section: MovingSpring
- Active DOFs: 정의에 따라 Y, Z 가 가능
SF, SE, DF, DE 등에 대한 설명은 *Element, TYPE=Spring 참조
*Section, Type=MovingSpring
MovigSpring의 단면을 정의
*Section, Type=MovingSpring, Name=name
surface, refx, refy, refz, g1x, g1y, g1z, xRigid, yRigid, zRigid
oneDof, k,kmat, c, cmat # oneDof = Y, Z
...
*Section, Type=MovingSpring, Name=name
line, xRigid, yRigid, zRigid
oneDof, k,kmat, c, cmat # oneDof = Y, Z
...
First dataline for Line
- line: target beam elset ... The beams should be connected
- xRigid,yRigid,zRigid: position vector from ref. node (rigid arm vector) (x1 is required, other optional)
First dataline for Surface
- surface: target surface (required)
- refx, refy, refz: 기준점(optional, default 0,0,0)
- g1x, g1y, g1z: 진행방향 (1,0,0)
- xRigid,yRigid,zRigid: position vector from ref. node (rigid arm vector) (optional, default 0,0,0)
Second datalines
- oneDof: 스프링/댐퍼를 적용할 자유도, Y, Z 중 하나
- k, km: 주어진 자유도에 대한 스프링 계수와 모델, km은 옵션
- c, cm: 주어진 자유도에 대한 스프링 계수와 모델, km은 옵션
3th datalines if neccessary
- oneDof: 스프링/댐퍼를 적용할 자유도, Y, Z 중 하나
- k, km: 주어진 자유도에 대한 스프링 계수와 모델, km은 옵션
- c, cm: 주어진 자유도에 대한 스프링 계수와 모델, km은 옵션